
Описание
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
ГИРОСКОП ФМ-18

Цель работы — знакомство с гироскопическим эффектом и определение момента инерции гироскопа.
Содержание работы
Гироскопом обычно называют быстровращающееся симметричное твердое тело, ось вращения (ось симметрии) которого может изменять свое направление в пространстве.
Свойствами гироскопа обладают вращающиеся небесные тела, артиллерийские снаряды, роторы турбин, устанавливаемых на судах, винты самолетов и т. д. В современной технике гироскоп – основной элемент всевозможных гироскопических устройств или приборов, широко применяемых для автоматического управления движением самолетов, судов, торпед, ракет, для целей навигации (указатели курса, горизонта, стран света и пр.) и во многих других.
Простейшим гироскопическим прибором, который входит в качестве основной составной части в большинство гироскопических устройств, является массивный диск (ротор гироскопа), закрепленный в кольцах так называемого карданова подвеса:
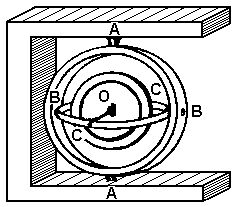
В этом приборе имеются три оси вращения, взаимно перпендикулярные и пересекающиеся в одной точке: ось АА1 наружного кольца подвеса, ось ВВ1 внутреннего кольца и ось СС1 ротора гироскопа (ось гироскопа). Гироскоп в кардановом подвесе.
Если общий центр тяжести подвижных частей прибора – ротора и двух колец – совпадает с точкой пересечения трех осей вращения прибора, то гироскоп сохраняет равновесие при любом положении его ротора – равновесие является безразличным. Такой гироскоп называется уравновешенным или астатическим.
ОСНОВНЫЕ СВОЙСТВА ГИРОСКОПА
Если ротор уравновешенного гироскопа не вращается, то достаточно слегка ударить по прибору, чтобы его ось вышла из первоначального положения и начала поворачиваться в соответствии с направлением силы удара. Это движение будет продолжаться, пока силы трения не остановят прибор в каком-то новом равновесном положении. Если же привести ротор гироскопа в быстрое вращение, то реакция его на действие внешних сил будет совершенно иной. Если теперь ударить по гироскопу, то его ось почти не изменит своего положения, и остановится сразу же после прекращения действия силы – ось гироскопа приобрела устойчивость, и эта устойчивость тем больше, чем больше угловая скорость вращения и момент инерции ротора. Изменится и направление движения оси: если к вращающемуся гироскопу приложить пару сил, стремящихся повернуть его около оси, перпендикулярной к оси его вращения, то он станет поворачиваться около третьей оси, перпендикулярной к первым двум. В этом и заключается так называемый гироскопический эффект.
Эти, парадоксальные на первый взгляд, свойства гироскопа могут быть поняты на основании следующего рассмотрения. Представим себе для простоты гироскоп в виде кольца KLMN, неизменно связанного с осью ОО’ (рис. 12.2) и вращающегося вокруг этой оси в направлении, указанном стрелкой.
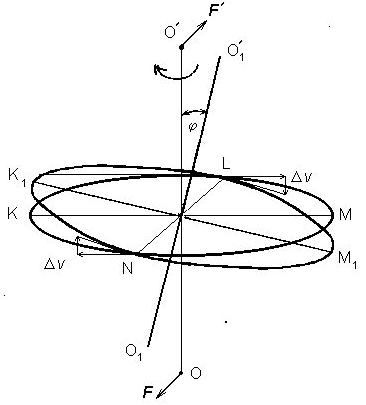
При поворачивании оси ОО’ в плоскости рисунка на малый угол j, она займет положение О1О1’, а кольцо KLMN перейдет в положение K1LM1N. При этом линейные скорости вращения всех точек кольца, кроме точек K и M, изменят свои направления. В точках K и M векторы скорости сместятся лишь параллельно самим себе: изменения для них равны нулю. Для точек L и N изменение скорости будет наибольшим, причем для точки L вектор будет направлен вниз, а для точки N – вверх. Для промежуточных точек кольца численные изменения скорости будут лежать в пределах от 0 до , причем для всей половины кольца KLM эти изменения направлены вниз, а для всей половины кольца MNK – вверх. Чтобы вызвать такие изменения скоростей, к оси надо приложить пару сил F и F’, лежащих в плоскости, перпендикулярной плоскости чертежа. Таким образом, для того, чтобы повернуть ось вращения гироскопа ОО’ вокруг направления LN, нужно приложить пару сил, стремящихся повернуть его вокруг перпендикулярного направления KM; гироскоп стремится расположить ось своего вращения таким образом, чтобы она образовывала возможно меньший угол с осью вынужденного вращения и чтобы оба вращения совершались в одном и том же направлении.
Действие пары сил на гироскоп.
Силы, приложенные к связям, удерживающим ось, равны силам F и F’, но направлены в противоположные стороны. Они носят название гироскопических сил.
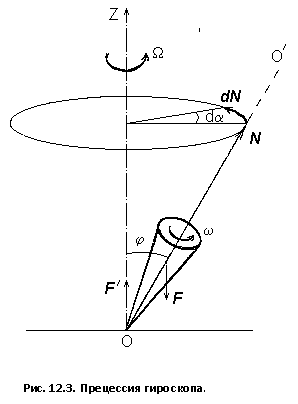
Чтобы получить количественное соотношение между силами, действующими на гироскоп, и изменением положения его оси, рассмотрим движение волчка, опирающегося на горизонтальную подставку в точке О и вращающегося вокруг своей оси ОО’ с угловой скоростью w). Пусть в некоторый момент времени волчок занимает наклонное положение, как показано на рисунке, и его ось составляет с вертикалью угол j. На волчок действует пара сил FF’ с моментом M (сила тяжести и реакция опоры, трением мы пренебрегаем), стремящаяся наклонить его ось еще больше. Благодаря гироскопическому эффекту ось отклоняется в перпендикулярном направлении, в результате чего волчок не падает, а начинает вращаться вокруг вертикальной оси OZ так, что его ось описывает коническую поверхность. Такое движение называется прецессией.
Найдем связь между угловой скоростью прецессии и моментом сил М. Момент количества движения волчка равен (12.1)
где I — его момент инерции относительно оси ОО’. Вектор направлен по оси волчка. (Равенство (12.1) не вполне точно, так как волчок участвует одновременно в двух вращательных движениях – вращении вокруг своей оси и прецессии около оси OZ. Но так как скорость прецессии невелика, ее влиянием на величину и направление вектора можно пренебречь). Согласно правилу моментов скорость изменения момента количества движения равна моменту внешних сил, действующих на волчок:
За бесконечно малый промежуток времени вектор получает перпендикулярное себе приращение
лежащее в горизонтальной плоскости. Следовательно,.
Но есть, очевидно, угловая скорость прецессии .(Заметим, что, так как момент сил в нашем случае – величина постоянная, то постоянной будет и угловая скорость прецессии). Подставив в последнее выражении, получим:
а, учитывая векторный характер величин, можем написать. (12.2)
По этой формуле можно определить величину и направление угловой скорости прецессии, если известен момент сил, действующих на гироскоп. Из формулы (12.2) также видно, что момент сил определяет не угловое ускорение (как это было для невращающегося гироскопа), а угловую скорость прецессии. Значит, как только внешнее воздействие прекращается (), ось гироскопа останавливается. Если воздействие было кратковременным, то ось успеет повернуться только на очень малый угол. Таким образом, видно, что гироскоп приобрел устойчивость.
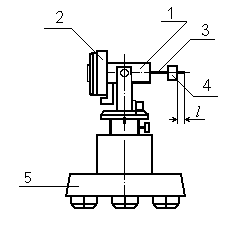
В нашей работе телом гироскопа служит электромотор 1 с маховиком 2, укрепленный на одном конце массивного стержня 3. На другом конце стержня имеется противовес 4, предназначенный для создания свободной уравновешенной системы относительно горизонтальной оси и получения момента внешних сил, вызывающих прецессию гироскопа. Прецессия гироскопа вызывается смещением противовеса вдоль стержня. Таким образом, момент сил, вызывающих прецессию, M равен разности моментов, создаваемых противовесом в неуравновешенном и уравновешенном состояниях, , где m – масса противовеса вместе с контргайкой, – плечо уравновешенного, а – плечо неуравновешенного гироскопа. Скорость вращения гироскопа и скорость прецессии определяются блоком управления.
Выполнение работы
При помощи регулировочных опор основания 5 по уровню гироскопа отрегулировать положение основания.Передвигая противовес 4, добиться того, чтобы система находилась в положении равновесия. С помощью штангенциркуля измерить расстояние от конца стержня 3 до ближайшей плоскости противовеса. Убедиться в том, что ось невращающегося гироскопа смещается по направлению действующих сил. При помощи кнопок блока управления включить электродвигатель гироскопа, установить скорость 6000 об/мин. Убедиться в отсутствии прецессии.Сместить противовес на несколько делений в любую сторону. При помощи штангенциркуля измерить расстояние от конца стержня до ближайшей плоскости противовеса l1.
Определить Dl1 по формуле: (12.3)
Включить электродвигатель и с помощью таймера блока определить время t1 поворота прецессирующего гироскопа на угол 180 градусов. Определить скорость прецессии по формуле: (12.4)Повторить измерения периода прецессии при нескольких (5-6) скоростях вращения ротора гироскопа w. Силы трения в роторе не дают возможности получать малые скорости вращения. Кроме того, чем больше скорость вращения, тем более устойчив гироскоп. Поэтому рекомендуется проводить измерения при скоростях не меньших, чем 1500 об/мин.Выполнить пп. 3-5 при других смещениях противовеса l (3-4 значения).Определить массу противовеса путем взвешивания.Представить результаты наблюдения графически, откладывая по оси абсцисс частоту , а по оси ординат – произведение . Точки в пределах ошибок наблюдения должны лежать на прямой, параллельной оси абсцисс (для каждого значения M будет своя прямая). Из этих наблюдений определить значение момента инерции гироскопа I.